
Part Of: Analysis sequence
Followup To: An Introduction to Topology
Content Summary: 1300 words, 13 min read
Degenerate Geometries
Two lines can either be parallel, or not. There exist unending variations of both situation. But which is more common, on the average?
Consider two lines 




The red line does not represent one line, but an infinite set of parallel lines where
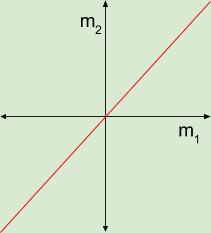
Suppose we start somewhere on the red line (with some pair of parallel lines)$. Perturbation of the slopes of these lines corresponds to a random walk beginning at that point. The more you walk around on the plane, the more likely you are to stand in green territory (slopes whose lines are not parallel).
Definition 1. A situation holds generically if, by that perturbing its constituent properties, it tends to default to that situation.
This concept applies in many situations. For example:
- In two dimensions, two lines might be parallel, but generically intersect at a point.
- In three dimensions, two planes might be parallel, but generically intersect in a line.
- In linear algebra, a matrix might be singular is its determinant is equal to zero. But the determinant becomes non-zero on perturbation of individual matrix values. Thus, matrices are generically invertible.
This concept has also been called general position.
Manifold Intersection & Overflow
We now turn to the general science of intersection. The following observations hold generically:
- In two dimensions, a point and another point do not intersect.
- In two dimensions, a point and a line do not intersect.
- In two dimensions, a line and a line do intersect, at a point.
- In three dimensions, a line and another line do not intersect.
- In three dimensions, a line and a plane do intersect, at a point.
- In three dimensions, a plane and another plane do intersect, at a line.
Points, lines, planes… these are manifolds! Some of them infinitely large, but manifolds nonetheless! Let’s use the language of topology to look for patterns.
Each of the above examples contains two submanifolds 



We represent 







In four dimensions, would we expect two planes to intersect; and if so, what would we expect the dimension of the intersection? Put differently, what would we predict to be the value of 

If you guessed 
Definition 2. Consider two submanifolds embedded in an ambient manifold 

Theorem 3. Let
- If
, the submanifolds do not intersect:
- If
, the intersection is non-empty
, and

To see why this is the case, consider basis vectors in linear algebra. An m-dimensional space requires an m-dimensional basis vector. Submanifold dimensions are then “placed within” the ambient basis. If we try to minimize the overlap between two submanifolds, the equation for overflow falls out of the picture. 🙂

Overflow during Motion
We have considered overflow in static submanifolds. But what if we move one of them?
The following observations hold generically:
- In two dimensions, moving a point across a point do not intersect.
- In two dimensions, moving a point across a line intersect, at a point.
- In two dimensions, moving a line across another line intersect, across the entire line.
- In three dimensions, moving a line across another line intersect, at a point.
- In three dimensions, moving a line across a plane intersect, at a line.
- In three dimensions, moving a plane across another plane intersect, across the entire plane.
Compare these “motion”
vs.
vs.
vs.
vs.
vs.
vs.
The dynamic overflow is one dimension larger than the static overflow. Why?
The way I like to think about it is, by moving K across time, you are effectively enlisting an extra dimension (time). A moving point starts to look like a string, etc.
Theorem 4. Let 
- If
, then generically, a crossing is possible (at all times,
)
- If
, then generically, a crossing is not possible (at some time,
Towards Isotopy
Let’s put this theorem to work.
Example 5. In what 

We know from physical experience that this is not possible in our three-dimensional universe


Intuitively, this makes sense. In three dimensions, a point can “hop” over a line by moving into the “extra” dimension. Similarly, the line
We can generalize this notion of successful crossing as follows:
Definition 6. Imagine moving submanifold 

![t \in [0,1]](https://s0.wp.com/latex.php?latex=t+%5Cin+%5B0%2C1%5D&bg=ffffff&fg=555555&s=0&c=20201002)



Isotopy is especially relevant to knot theory. A classic example is the trefoil knot, a simple kind of knot. The string trefoil knot composed of 1-dimensional string is not isotopic to the unknot (1-torus) in 
Example 7. Show how the trefoil knot can isotope to the unknot.
- From
: we can unwind the trefoil knot in
: simply lift the top-left string up.
- From
to
: you only need

So knot theory is only interesting in 
More Isotopy Examples
Let’s get some more practice under our belt.
Example 8. Consider a genus-two torus with its holes intertwined. What ambient manifold do we require to undo the knot?

We might imagine the solution isotope would require us to pull apart the “hands” directly. And it is true that we can successfully isotope in 

But do we really need six dimensions to get this done? Or can we do better? It turns out that we only really need 

As the number of ambient dimensions increases, finding an isotope becomes increasingly easy. Thus, we often strive to find the smallest possible ambient manifold.
Example 9. Consider a genus-3 torus (




It is easy to see that 
But it takes some time to see that 


Related Materials
This post is based on Dr. Tadashi Tokeida’s excellent lecture series, Topology & Geometry. For more details, check it out!

This and the original introduction to topology article look heavily based off the videos by Tadashi Tokieda to the AIMS I believe if this is a case you should credit him
LikeLiked by 1 person
Thanks for your comment! Fixed.
LikeLike