
Part Of: Machine Learning sequence
Followup To: Bias vs Variance, Gradient Descent
Content Summary: 1100 words, 11 min read
In Intro to Gradient Descent, we discussed how loss functions allow optimization methods to locate high-performance models.
But in Bias vs Variance, we discussed how model performance isn’t the only thing that matters. Simplicity promotes generalizability.
One way to enhance simplicity is to receive the model discovered by gradient descent, and manually remove unnecessary parameters.
But we can do better. In order to automate parsimony, we can embed our preference for simplicity into the loss function itself.
But first, we need to quantify our intuitions about complexity.
Formalizing Complexity
Neural networks are often used as classification models against large numbers of images. The complexity of the models tends to correlate with the number of layers. For some models then, complexity is captured in the number of parameters.
While not used much in the industry, polynomial models are pedagogically useful examples of regression models. Here, the degree of the polynomial expresses the complexity of the model: a degree-eight polynomial has more “bumps” than a degree-two polynomial.
Consider, however, the difference between the following regression models


Model A uses five parameters; Model B uses three. But their predictions are, for all practical purposes, identical. Thus, the size of each parameter is also relevant to the question of complexity.
The above approaches rely on the model’s parameters (its “visceral organs”) to define complexity. But it is also possible to rely on the model’s outputs (its “behaviors”) to achieve the same task. Consider again the classification decision boundaries above. We can simply measure the spatial frequency (the “squiggliness” of the boundary) as another proxy towards complexity.
Here, then, are three possible criteria for complexity:
- Number of parameters
- Size of parameters
- Spatial frequency of decision manifold
Thus, operationalizing the definition of “complexity” is surprisingly challenging.
Mechanized Parsimony
Recall our original notion of the performance-complexity quadrant. By defining our loss function exclusively in terms of the residual error, gradient descent learns to prefer accurate models (to “move upward”). Is there a way to induce leftward movement as well?
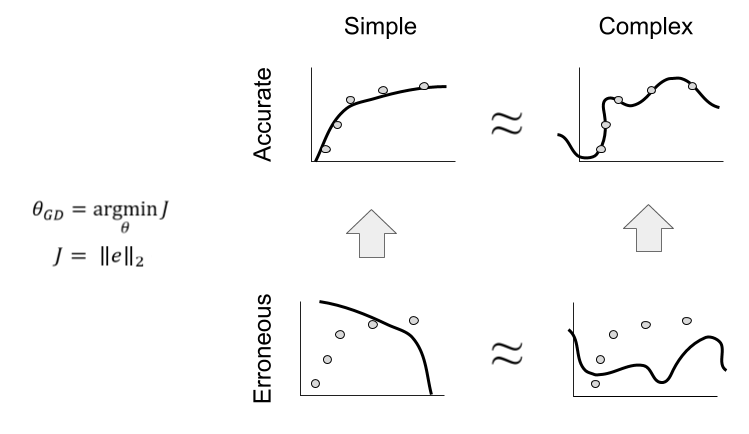
To have gradient descent respond to both criteria, we can embed them into the loss function. One simple way to accomplish this: addition.
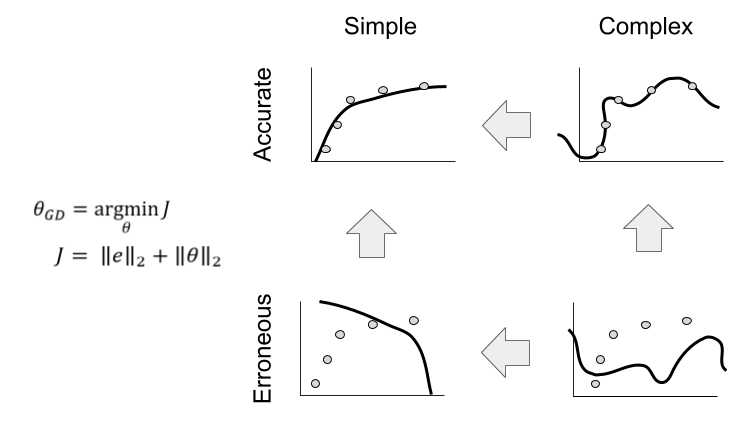
This technique is an example of regularization.
Depending on the application, sometimes the errors are much larger than the parameters or vice versa. In order to assure the right balance between these terms, people usually add a hyperparameter to the regularized loss function

A Geometric Interpretation
Recall Einstein’s insight that gravity is curvature of spacetime. You can envision such curvature as a ball pulling on a sheet. Here is the gravity well of bodies of the solar system:
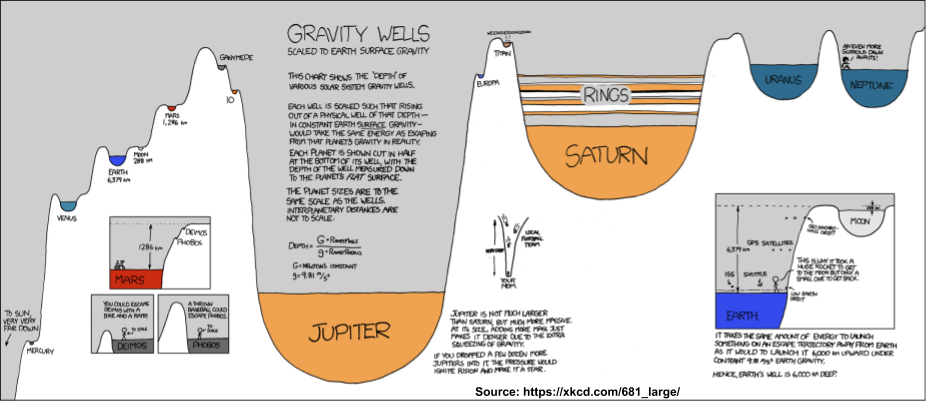
Every mass pulls on every other mass! Despite the appearance of the above, Earth does “pull on” Saturn.
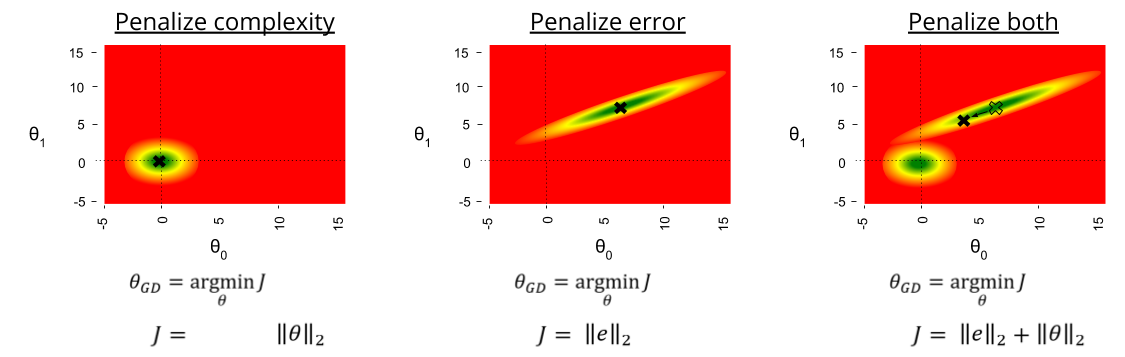
The unregularized cost function we saw last time creates a convex loss function, which we’ll interpret as a gravity well centered around parameters of best fit. If we replace J with a function that only penalizes complexity, a corresponding gravity well appears, centered around parameters of zero size.
If we keep both terms, we see the loss surface now has two enmeshed gravity wells. If scaled appropriately, the “zero attractor” will pull the most performant solution (here 

More on L1 vs L2
Previously, I introduced the L1 norm aka mean average error MAE

Another loss function is the L2 norm aka root mean squared error RMSE

The L1 and L2 norms respectively correspond to Euclidean vs Manhattan distance (roughly, plane vs car travel):

One useful way to view norms is by their isosurface. If you can travel in any direction for a finite amount of time, the isosurface is the frontier you might sketch.
The L2 isosurface is a circle. The L1 isosurface is a diamond.
- If you don’t change direction, you can travel the “normal” L2 distance.
- If you do change direction, your travel becomes inefficient (since “diagonal” travel along the hypotenuse is forbidden).
The Lp Norm as Superellipse
Consider again the formulae for the L1 and L2 norm. We can generalize these as special cases of the Lp norm:

Here are isosurfaces of six exemplars of this norm family:
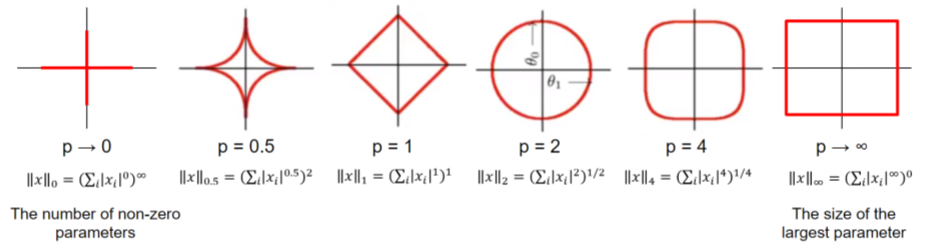
On inspection, the above image looks like a square that’s inflating with increasing p. In fact, the Lp norm generates a superellipse.
As an aside, note that the boundaries of the Lp norm family operationalize complexity rather “intuitively”. For the L0 norm, complexity is the number of non-zero parameters. For the Linf norm, complexity is the size of the largest parameter.
Lasso vs Ridge Regression
Why the detour into geometry?
Well, so far, we’ve expressed regularization as 
Here are two options for the residual norm:
: sensitive to outliers, but a stable solution
: robust to outlier, but an unstable solution
The instability of
That leaves us with two remaining choices:
- Ridge Regression:
: computationally inefficient, but sparse output.
- Lasso Regression:
: computationally efficient, non-sparse output
What does sparse output mean? For a given model type, say 



Geometry to the rescue!
In ridge regression, both gravity wells have convex isosurfaces. Their compromises are reached anywhere in the loss surface. In lasso regression, the diamond-shaped complexity isosurface tends to push compromises towards axes where 
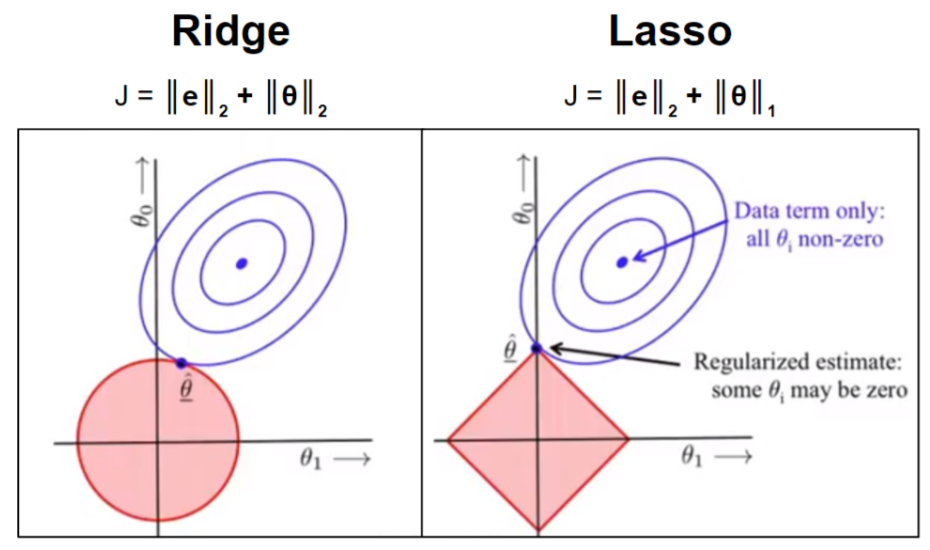
Both Ridge and Lasso regression are used in practice. The details of your application should influence your choice. I’ll also note in passing that “compromise algorithms” like Elastic Net exist, that tries to capture the best parts of either algorithm.
Takeaways
I hope you enjoyed this whirlwind tour of regularization. For a more detailed look at ridge vs lasso, I recommend reading this.
Until next time.
 where
where  is the slope, and
is the slope, and  is the y-intercept.
is the y-intercept.  can be uniquely described by its parameters
can be uniquely described by its parameters  . Just as we can plot data in a
. Just as we can plot data in a  , we can plot models in a parameter space using coordinates
, we can plot models in a parameter space using coordinates  .
. 

 where
where  . In fact, we typically reserve the word error for test data, and
. In fact, we typically reserve the word error for test data, and 
![[ -30, 30, -30, 30]](https://s0.wp.com/latex.php?latex=%5B+-30%2C+30%2C+-30%2C+30%5D&bg=ffffff&fg=555555&s=0&c=20201002) earns the same score as a “perfect model”
earns the same score as a “perfect model” ![[0, 0, 0, 0]](https://s0.wp.com/latex.php?latex=%5B0%2C+0%2C+0%2C+0%5D&bg=ffffff&fg=555555&s=0&c=20201002) . The morale: positive and negative errors should not cancel each other out.
. The morale: positive and negative errors should not cancel each other out.![[ 1, -1, 1, -1, 1, -1 ]](https://s0.wp.com/latex.php?latex=%5B+1%2C+-1%2C+1%2C+-1%2C+1%2C+-1+%5D&bg=ffffff&fg=555555&s=0&c=20201002) earns the same score as a poor model against small data
earns the same score as a poor model against small data ![[ 3, -3 ]](https://s0.wp.com/latex.php?latex=%5B+3%2C+-3+%5D&bg=ffffff&fg=555555&s=0&c=20201002) . The morale: cost functions should be invariant to data volume.
. The morale: cost functions should be invariant to data volume.


 encodes the model
encodes the model  with the smallest loss
with the smallest loss  .
. 






 with
with  possible outcomes, and another event
possible outcomes, and another event  with
with  is
is  .
.  possibilities occurs
possibilities occurs  possible outcomes.
possible outcomes.  possible outcomes.
possible outcomes.  possible outcomes.
possible outcomes. 
 possible trifecta bets.
possible trifecta bets. 

 . How can we get rid of the other terms? By division, of course!
. How can we get rid of the other terms? By division, of course!


 possible trifecta bets. But how many
possible trifecta bets. But how many  and
and  are equivalent for a boxed trifecta bet. We can identify four groups, with six equivalent permutations each:
are equivalent for a boxed trifecta bet. We can identify four groups, with six equivalent permutations each:
 !
!
 cookies
cookies  to give to
to give to  kids. How many possible ways are there to do so?
kids. How many possible ways are there to do so? ,
,  ,
,  , and
, and  . But there is an important difference: horse-less medals are impossible, but cookie-less children are not! So we need to account for situations like
. But there is an important difference: horse-less medals are impossible, but cookie-less children are not! So we need to account for situations like  , with one child getting all of the cookies.
, with one child getting all of the cookies.
 .
. bars. Thus:
bars. Thus:



 .
. and
and  . A single horse cannot win multiple medals. Multiply-realized possibilities are not allowed.
. A single horse cannot win multiple medals. Multiply-realized possibilities are not allowed.








 . T
. T

 denote how many variables we admit in our context. A
denote how many variables we admit in our context. A  . Then the size of our CPT is
. Then the size of our CPT is  , because we must take our original variable into account. Thus an
, because we must take our original variable into account. Thus an 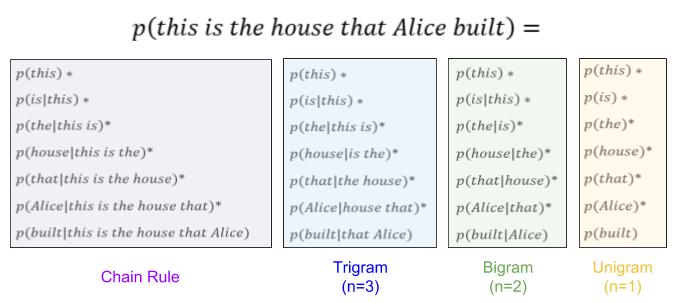




 . And it is true that “this” occurs only once in our toy corpus above. But out of two sentences, “this” leads half of them. We can express this fact by adding a special START token into our vocabulary.
. And it is true that “this” occurs only once in our toy corpus above. But out of two sentences, “this” leads half of them. We can express this fact by adding a special START token into our vocabulary. 
 , because we have no instances of this two-word sequence in our toy corpus. But this causes our language model to fail catastrophically: the sentence is deemed impossible (0% probability).
, because we have no instances of this two-word sequence in our toy corpus. But this causes our language model to fail catastrophically: the sentence is deemed impossible (0% probability). events. You’ll notice echoes of the
events. You’ll notice echoes of the 
 -gram is not likely to occur in
-gram is not likely to occur in  -gram model. For example, it is very possible that the phrase “dancing were thought” hasn’t been seen before.
-gram model. For example, it is very possible that the phrase “dancing were thought” hasn’t been seen before. 
 , we want to produce the English sentence
, we want to produce the English sentence  such that
such that  .
.  , there are
, there are  possible two-word sentences. For sentences of length
possible two-word sentences. For sentences of length  .
.  : Jane is visiting Africa in September
: Jane is visiting Africa in September : Jane is going to Africa in September
: Jane is going to Africa in September : In September, Jane went to Africa
: In September, Jane went to Africa  is the best (most probable) translation. We would like greedy search to recover it.
is the best (most probable) translation. We would like greedy search to recover it. , then the next word generated is
, then the next word generated is  . However, it is not difficult to contemplate
. However, it is not difficult to contemplate  , since the word “going” is used so much more frequently in everyday conversation. These problems of local optima happen surprisingly often.
, since the word “going” is used so much more frequently in everyday conversation. These problems of local optima happen surprisingly often.

 and
and  . We will denote
. We will denote  as
as  . We will use this notation instead of the more common
. We will use this notation instead of the more common  . Both represent the idea “apply
. Both represent the idea “apply  .
. 


 isn’t even a
isn’t even a  to the underlying set exacerbates the problem: then both
to the underlying set exacerbates the problem: then both  and
and  .
.
 denotes composition over a set of all bijections (permutations) over some set of
denotes composition over a set of all bijections (permutations) over some set of  .
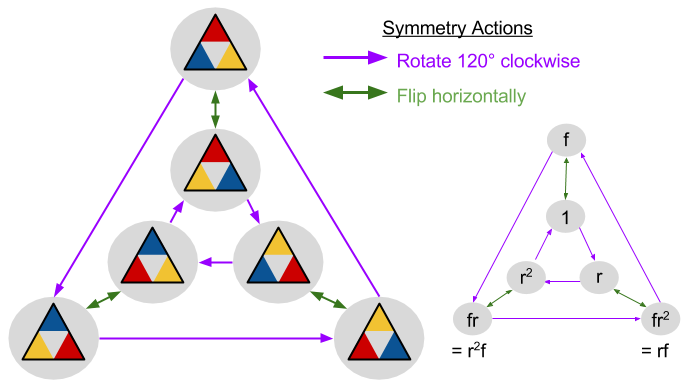
. is the set of all permutations over a 3-element set. It is of order
is the set of all permutations over a 3-element set. It is of order  .
. . The top row represents the original elements
. The top row represents the original elements  , the bottom represents where each element has been relocated
, the bottom represents where each element has been relocated  .
. 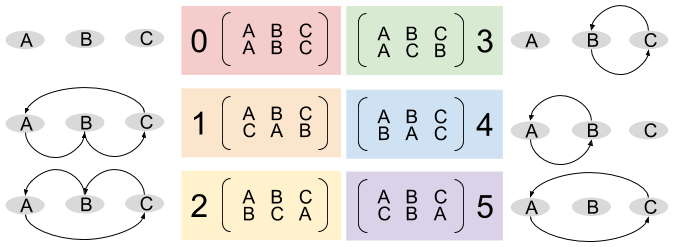
 has two permutations with 3-cycles: can you find them?
has two permutations with 3-cycles: can you find them?  , pronounced “
, pronounced “ goes to
goes to  goes to …”.
goes to …”.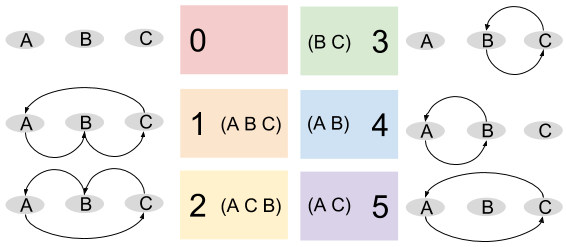
 .
. and
and  , take each element
, take each element  and follow its arrows until you find the set of disjoint cycles. More formally, compose these functions
and follow its arrows until you find the set of disjoint cycles. More formally, compose these functions  .
.  .
.
 .
. 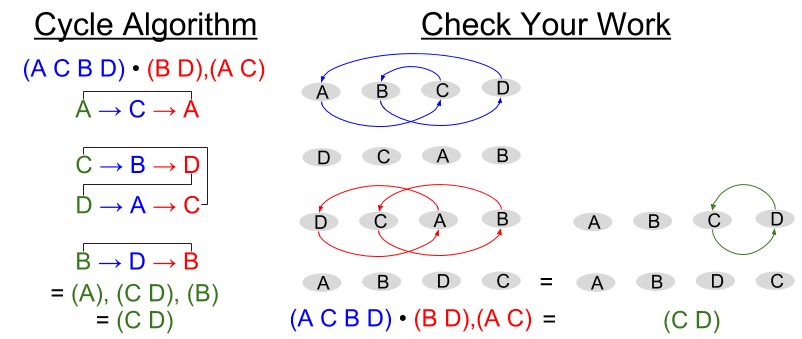
 ) can be omitted: their inclusion does not affect algorithm results.
) can be omitted: their inclusion does not affect algorithm results. . Contrast this with composition, which does not commute
. Contrast this with composition, which does not commute  .
.
 ? It is isomorphic to
? It is isomorphic to 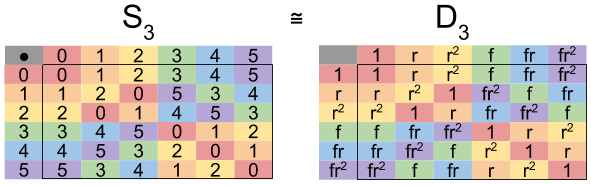
 and
and  resemble rotations/cycles;
resemble rotations/cycles;  ,
,  , and
, and  perform reflections/flips.
perform reflections/flips. has three transpositions
has three transpositions  ,
,  , and
, and  .
. . In fact, we can lay claim to an even stronger fact:
. In fact, we can lay claim to an even stronger fact: .
. , we can generate our “dihedral-looking” Cayley graph by selecting generators
, we can generate our “dihedral-looking” Cayley graph by selecting generators  and
and  .
. .
. .
. .
. 
 means a green arrow
means a green arrow  .
. , because arrows in the latter are monochrome and unidirectional.
, because arrows in the latter are monochrome and unidirectional.
 ,
,  . And we can confirm by inspection that, in fact,
. And we can confirm by inspection that, in fact,  etc.
etc.
 . These have 2, 4, and 8 permutations, respectively.
. These have 2, 4, and 8 permutations, respectively.  . These have 3, 5, and 9 permutations, respectively.
. These have 3, 5, and 9 permutations, respectively. are even permutations.
are even permutations. of odd permutations.
of odd permutations. . Just as
. Just as  ,
,  elements.
elements.  in more detail. Does it remind you of anything?
in more detail. Does it remind you of anything? ..!
..!
 . Is it also true that e.g.,
. Is it also true that e.g.,  and
and  ?
? and
and  . Only
. Only  , these sets are not even potentially isomorphic. For example:
, these sets are not even potentially isomorphic. For example: .
. .
. .
.
 .
.
 . However, for larger
. However, for larger  ). Are finite groups possible?
). Are finite groups possible? . Is it a group? No, it isn’t even a magma:
. Is it a group? No, it isn’t even a magma:  ! Is there a different operation that would produce closure?
! Is there a different operation that would produce closure?  , on
, on  . For example,
. For example,  .
.
 .
. is an
is an  . Its solutions, or roots, is the set
. Its solutions, or roots, is the set  . This set is called the fourth roots of unity.
. This set is called the fourth roots of unity. ? In the following table, recall that
? In the following table, recall that  , thus
, thus  .
.
 . Let’s compare the function maps of our two groups:
. Let’s compare the function maps of our two groups: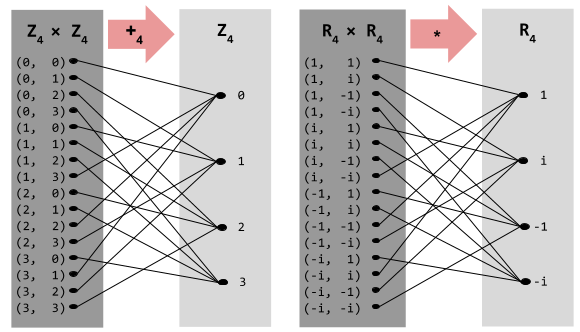
 . Let
. Let .
.
 . Inspection reveals that this, too, is isomorphic to
. Inspection reveals that this, too, is isomorphic to  !
! , there exists some generator
, there exists some generator  , where r is any generator.
, where r is any generator. .
.
 . But you can also recreate them by
. But you can also recreate them by  .
.  , or multiplying by
, or multiplying by  . Only
. Only  fails to be a generator.
fails to be a generator.  rotation, and counterclockwise
rotation, and counterclockwise  .
. .
. .
.  ? All non-identity elements:
? All non-identity elements:  .
.  .
. configurations. It would take a long time just writing down such a group. But it has only six generators (one for a
configurations. It would take a long time just writing down such a group. But it has only six generators (one for a 
 .
. .
. suffix is often left implicit from presentations (e.g.,
suffix is often left implicit from presentations (e.g.,  ) for the sake of concision.
) for the sake of concision. 
 . Let us consider the “triangle group”
. Let us consider the “triangle group”  rotation
rotation  and a horizontal flip
and a horizontal flip  . Similarly, two flips returns to the identity
. Similarly, two flips returns to the identity  . Is there some combination of rotations
. Is there some combination of rotations 
 .
.
 .
.

 is not abelian: its multiplication table is not symmetric about the diagonal.
is not abelian: its multiplication table is not symmetric about the diagonal. table with a
table with a  table. We will explore this intuition further, when we discuss quotients.
table. We will explore this intuition further, when we discuss quotients. and
and  When do we call these lines parallel? When their slopes are equal
When do we call these lines parallel? When their slopes are equal  . We can gain insight into the situation by mapping
. We can gain insight into the situation by mapping  and
and  form the horizontal and vertical axes respectively.
form the horizontal and vertical axes respectively.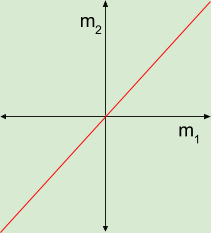
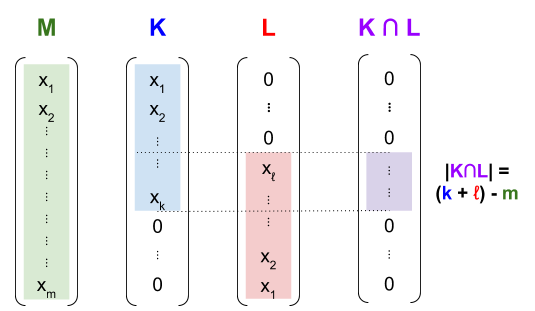
 and
and  being placed in an
being placed in an  . We denote their intersection as
. We denote their intersection as  . Let us compare the dimensions of these three manifolds to the dimension of their overlap.
. Let us compare the dimensions of these three manifolds to the dimension of their overlap.  as
as  respectively. Now our examples can be expressed as 4-tuples
respectively. Now our examples can be expressed as 4-tuples  :
:





 ?
?  , that the two planes intersect at a point, you have noticed the pattern!
, that the two planes intersect at a point, you have noticed the pattern!  . The overflow is defined as
. The overflow is defined as 
 , the submanifolds do not intersect:
, the submanifolds do not intersect: 
 , the intersection is non-empty
, the intersection is non-empty  , and
, and 
 vs.
vs.  vs.
vs.  vs.
vs.  vs.
vs.  vs.
vs.  :
: , then generically, a crossing is possible (at all times,
, then generically, a crossing is possible (at all times,  , then generically, a crossing is not possible (at some time,
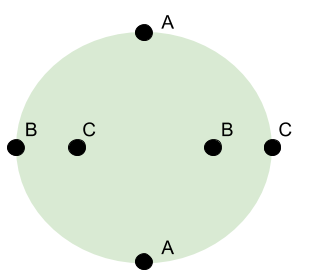
, then generically, a crossing is not possible (at some time,  is the following movement possible?
is the following movement possible?
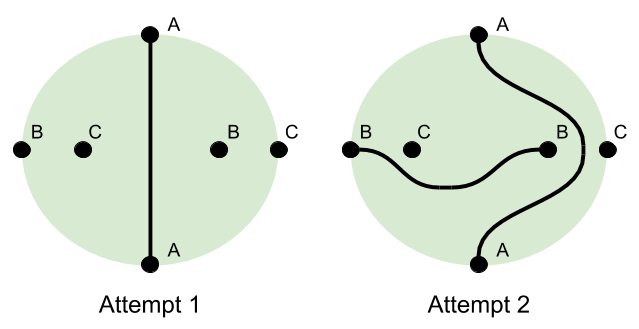
 . But Theorem 4 says that, if the ambient dimension is four, then the overflow is
. But Theorem 4 says that, if the ambient dimension is four, then the overflow is  , so crossing is possible.
, so crossing is possible. and
and  represent the beginning and end positions as it travels throughout time
represent the beginning and end positions as it travels throughout time ![t \in [0,1]](https://s0.wp.com/latex.php?latex=t+%5Cin+%5B0%2C1%5D&bg=ffffff&fg=555555&s=0&c=20201002) . If
. If  never has self-intersection at any time
never has self-intersection at any time  , we say
, we say 
 : this is why it is called
: this is why it is called  : we can unwind the trefoil knot in
: we can unwind the trefoil knot in  : simply lift the top-left string up.
: simply lift the top-left string up.  to
to  : you only need
: you only need 
 , knots self-intersect. In
, knots self-intersect. In 
 ; after all
; after all  .
. :
:
 ). If we isotope along its surface using
). If we isotope along its surface using  , is
, is  ? How about
? How about  ?
? 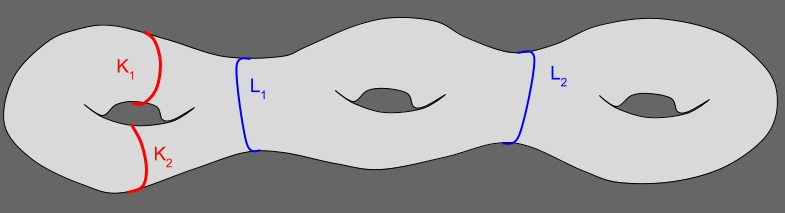
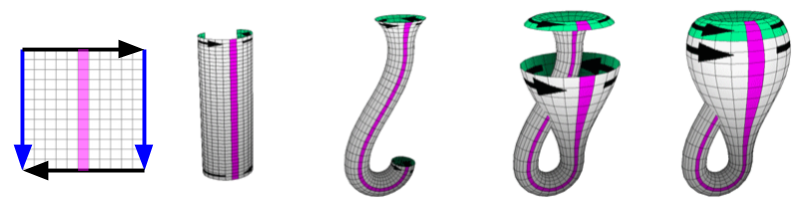
 . You just pull the circle left, along that surface of the torus.
. You just pull the circle left, along that surface of the torus. . You might suspect you can just pull the blue circle over the middle hole. But that would require leaving the surface
. You might suspect you can just pull the blue circle over the middle hole. But that would require leaving the surface  (but
(but  ).
). represents the set of fruits which I prefer.
represents the set of fruits which I prefer. can represent, among other things, the fingers on my left hand.
can represent, among other things, the fingers on my left hand. .
. .
. and
and  expresses the very same set.
expresses the very same set.  . We will prefer to express sets with the latter, more compact, notation.
. We will prefer to express sets with the latter, more compact, notation. is a perfectly valid two-element set, quite distinct from the three-element set
is a perfectly valid two-element set, quite distinct from the three-element set  .
. ) if A and B contain exactly the same elements.
) if A and B contain exactly the same elements. and
and  . Then,
. Then,  . Then,
. Then,  .
. . Otherwise, we write
. Otherwise, we write  .
. . Then
. Then  means “yellow is an element of the set of primary colors”.
means “yellow is an element of the set of primary colors”. means “-1 is not an element of the natural numbers”.
means “-1 is not an element of the natural numbers”. . The element
. The element  is.
is. , its
, its  , is the number of elements in that set.
, is the number of elements in that set. .
. . Then
. Then  . Note that cardinality only looks at “the outer layer”.
. Note that cardinality only looks at “the outer layer”.  is the set containing no elements.
is the set containing no elements.  .
. .
. .
.  , where the | symbol is pronounced “such that”.
, where the | symbol is pronounced “such that”. . In words “let A be the set of integers X such that x is greater than zero and less than six.”
. In words “let A be the set of integers X such that x is greater than zero and less than six.” .
. and let
and let  . Here
. Here  bits of computer memory, each bit of which is uniquely identified with a 6-bit address. Suppose further that our memory has been allocated to data structures of varying size. To promote addressing efficiency, a computer can adopt the following strategy: assign shorter addresses to larger variables.
bits of computer memory, each bit of which is uniquely identified with a 6-bit address. Suppose further that our memory has been allocated to data structures of varying size. To promote addressing efficiency, a computer can adopt the following strategy: assign shorter addresses to larger variables.
 , if every element of
, if every element of  and
and  . Then
. Then  . Then
. Then  (C does not contain 9).
(C does not contain 9). ? Yes. For all
? Yes. For all  is true.
is true. , if
, if  is the set of all subsets of
is the set of all subsets of  . Then
. Then  .
.
 , then
, then  .
. ) versus subset-of (
) versus subset-of (  ) relations. Consider again
) relations. Consider again  . But
. But  . The
. The  . But
. But  . The
. The  -algebras draw from the power set of natural numbers
-algebras draw from the power set of natural numbers  .
. is the set of all
is the set of all  such that
such that  and
and  . Note that, unlike the elements in a set, the elements of an ordered pair cannot be reordered.
. Note that, unlike the elements in a set, the elements of an ordered pair cannot be reordered. and
and  . Then
. Then  .
.
 . Thus,
. Thus,  . This is because elements within ordered pairs cannot be rearranged.
. This is because elements within ordered pairs cannot be rearranged. . In combinatorics, this observation generalizes to the multiplication principle.
. In combinatorics, this observation generalizes to the multiplication principle. is a well-known example of a Cartesian product.
is a well-known example of a Cartesian product. , their Cartesian product is the set of all n-tuples.
, their Cartesian product is the set of all n-tuples. ,
,  and
and  . Now
. Now  .
. , is the set of elements common to both sets.
, is the set of elements common to both sets. and
and  . Then
. Then  .
. . Then
. Then  .
. .
. .
. .
.

 . This
. This  is the set of elements in
is the set of elements in  and
and  . Then
. Then  and
and  .
. . Then
. Then  and
and  .
. is the set of elements in
is the set of elements in  .
.
 and let its universe be the set of complex numbers
and let its universe be the set of complex numbers  . It is true that
. It is true that  .
. is the set of all elements of
is the set of all elements of  and
and  .
.



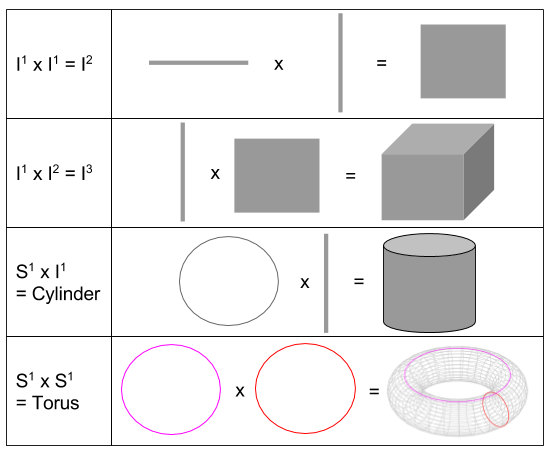
 is a line segment
is a line segment is a
is a  is a
is a  is a
is a  makes the volume-surface relationship explicit. For example, we say that
makes the volume-surface relationship explicit. For example, we say that  .
.



 :
:







 is at the intersection formed by a line through
is at the intersection formed by a line through  is the error of that approximation.
is the error of that approximation.
 and
and  . This plane can be described with a matrix, by mapping the basis vectors onto its column space:
. This plane can be described with a matrix, by mapping the basis vectors onto its column space:


 are self-transpositions. We have shown that such matrices are square symmetric, and thereby contain positive, real eigenvalues.
are self-transpositions. We have shown that such matrices are square symmetric, and thereby contain positive, real eigenvalues.


 , that accepts a vector
, that accepts a vector 





 :
:
 such that the error
such that the error  is minimized.
is minimized.
 as small as possible. Since
as small as possible. Since  can never leave the column space, choose the closest point to
can never leave the column space, choose the closest point to  is the projection of b onto the column space. The error is perpendicular to that subspace. Therefore
is the projection of b onto the column space. The error is perpendicular to that subspace. Therefore 



 :
:![\bar{x} = \left[ (A^TA)^{-1}A^T \right] b = \begin{bmatrix} 4/3 & 1/3 & -2/3 \\ -1/2 & 0 & 1/2 \\ \end{bmatrix} \begin{bmatrix} 1 \\ 2 \\ 2 \\ \end{bmatrix} = \begin{bmatrix} 2/3 \\ 1/2 \\ \end{bmatrix}](https://s0.wp.com/latex.php?latex=%5Cbar%7Bx%7D+%3D+%5Cleft%5B+%28A%5ETA%29%5E%7B-1%7DA%5ET+%5Cright%5D+b+%3D+%5Cbegin%7Bbmatrix%7D+4%2F3+%26+1%2F3+%26+-2%2F3+%5C%5C+-1%2F2+%26+0+%26+1%2F2+%5C%5C+%5Cend%7Bbmatrix%7D+%5Cbegin%7Bbmatrix%7D+1+%5C%5C+2+%5C%5C+2+%5C%5C+%5Cend%7Bbmatrix%7D+%3D+%5Cbegin%7Bbmatrix%7D+2%2F3+%5C%5C+1%2F2+%5C%5C+%5Cend%7Bbmatrix%7D&bg=ffffff&fg=555555&s=0&c=20201002)


{kind=link}